 AI
AI
 AWS
AWS
 Agile
Agile
 Algorithms
Algorithms
 Android
Android
 Apple
Apple
 Bash
Bash
 C++
C++
 Csharp
Csharp
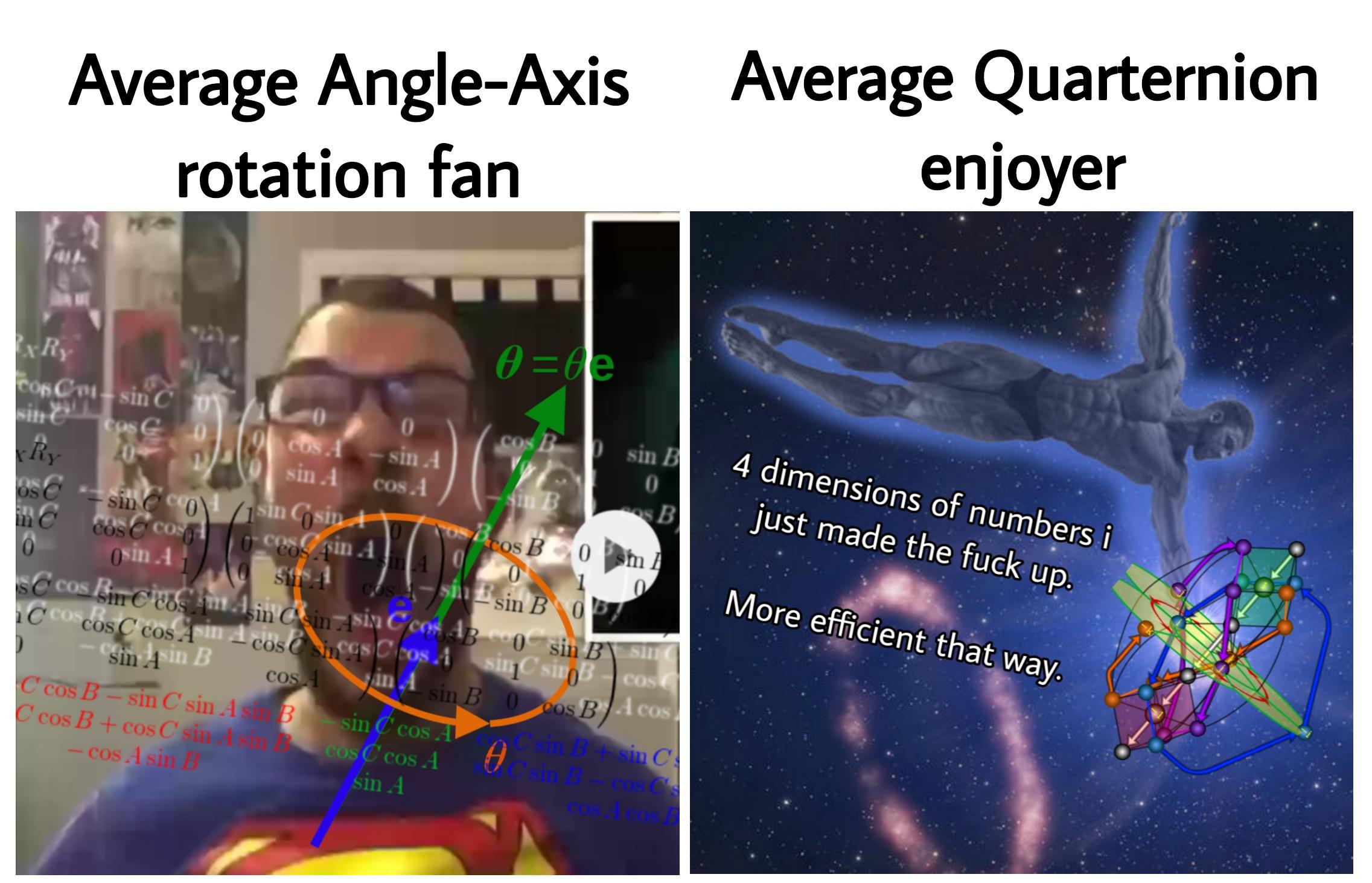
Left side: Regular 3D rotation math with sines and cosines. Complex but manageable if you've ever implemented a camera system.
Right side: Quaternions. Four-dimensional math that makes rotation calculations significantly more efficient but looks like someone dropped acid while reading a linear algebra textbook.
Game developers be like: "Yes, I understand quaternions perfectly" while secretly copy-pasting code from Stack Overflow and praying it doesn't introduce gimbal lock.